












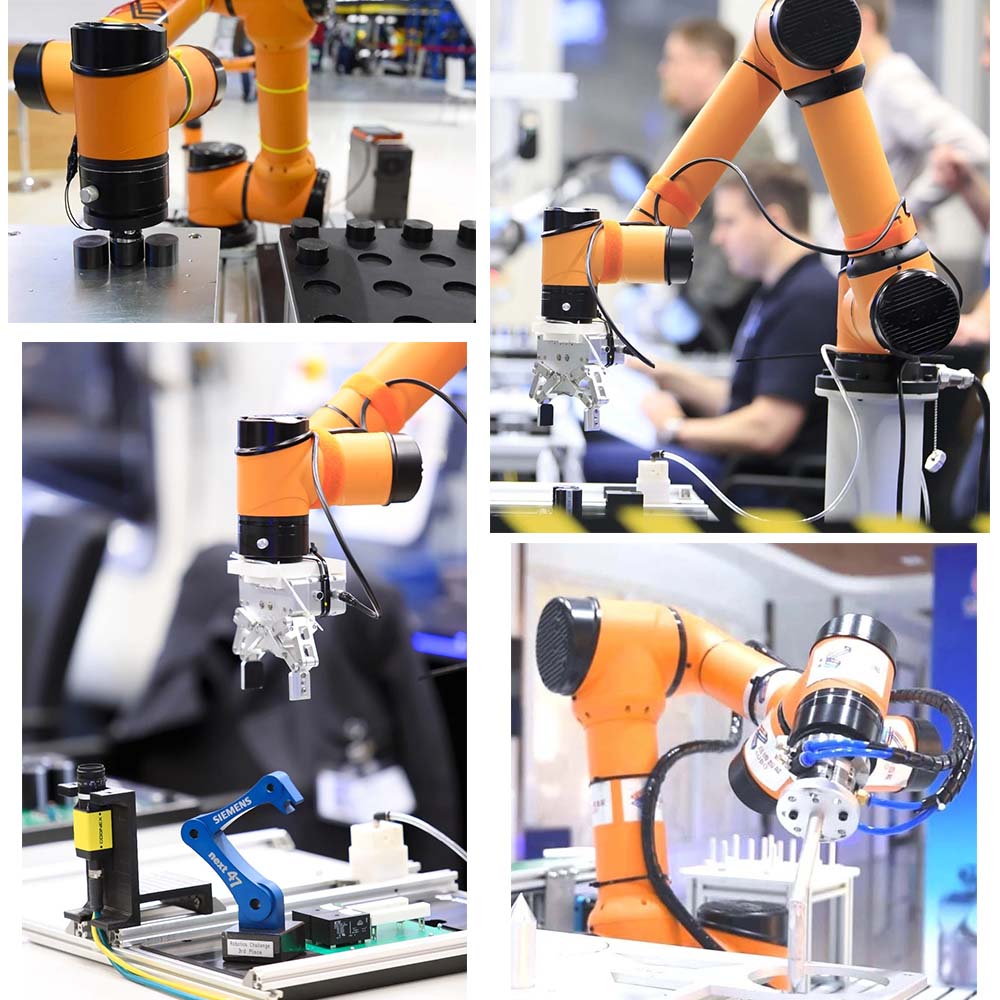
6-осевой манипулятор для системы автоматизации
Описание продукта
6-осевой манипулятор для системы автоматизации
Состав ковочного манипулятора
Приводной механизм: он включает когти, запястья, руки, стойки и механизм ходьбы.
1. Коготь
Это та часть, которая зажимает заготовку, похожа на зажим кузнечного манипулятора. Форма зажимного когтя похожа на человеческий палец, с зажимным и разжимающим действием.
2. Запястье
Это деталь, которая соединяет коготь и рычаг, поддерживает захват и регулирует положение зажатой заготовки в пространстве. Запястье обычно имеет три движения: качание, качание влево и вправо и вращение вокруг собственной оси. У некоторых манипуляторов нет запястья.
3. Arm
Это компонент, используемый для поддержки зажатой заготовки, захватов и запястья. Он может перемещать заготовку из одного положения в другое в пространстве по определенной траектории. Обычно рука выполняет такие движения, как разгибание вперед и назад, подъем вверх и вниз, вращение влево и вправо, а также качание вверх и вниз.
4. Колонка
Это часть, которая поддерживает руку. Столбик манипулятора обычно является фиксированным, иногда в связи с необходимостью столбец также может быть выполнен подвижным, называемым подвижным столбцом.
5. Ходовой механизм
Когда манипулятору необходимо выполнить операцию на относительно большом расстоянии, на основание можно установить шагающий механизм, такой как ролики и направляющие, чтобы реализовать движение всей машины.
Интеллект
1. Системы технического зрения могут быть интегрированы в контроллер.
2. Программная система на основе управления облачной платформой, которая реализует удаленное обслуживание, диагностику неисправностей и онлайн-обновление прошивки.
3. Эта платформа исследовательского робота широко используется во всем мире в корпоративных исследовательских лабораториях и для научных исследований робототехники.
Модульная конструкция
1. Робот может иметь от четырех до семи степеней свободы в соответствии с требованиями пользователя.
2. Длина соединения может быть изменена на более длинные или короткие звенья.
Помимо роботов-манипуляторов, наша компания также предлагает множество продуктов, таких как экстрактор паяльного дыма, дозатор паяльной пасты, пневматический ручной шнековый питатель, автоматический шнековый питатель. Если вам нужны эти продукты, вы можете связаться с нами, мы ответим вам в ближайшее время.
Технические характеристики
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||



Группа Продуктов : Робот-манипулятор > Kingsom Новое прибытие Промышленный ковочный манипулятор Robot Arm